

09|其他规划策略:Utility AI 和 Supervisor
张嘉熙

你好,我是张嘉熙。
在 06 讲我们花了大量篇幅拆解 GOAP——Embabel 的默认规划器,以及它如何用确定性 A* 搜索在复杂业务场景中吊打 ReAct。但在结尾处,我留了一个钩子:Embabel 的 Plan 组件是可插拔的,除了 GOAP,框架还内置了另外两种规划器:Utility AI 和 Supervisor。
这不是备胎,不是“顺便支持一下”。恰恰相反,这三种规划器共同构成了 Embabel 在规划层的完整设计哲学:不是所有任务都需要目标导向,也不是所有复杂度都能被一个单体 Agent 消化。 不同的任务形态,需要不同的规划策略。GOAP 是默认的最优解,但不是万能的唯一解。
本讲,我们就来拆解这两个“非默认”规划器:它们分别解决什么问题、怎么工作、什么时候该用。看完你会理解,为什么说 Embabel 的规划器生态不是三选一的单选题,而是一套可以按需组合的武器库。
三种规划器,一张全景图
在深入细节之前,先把三种规划器放在一张全景图中俯瞰:
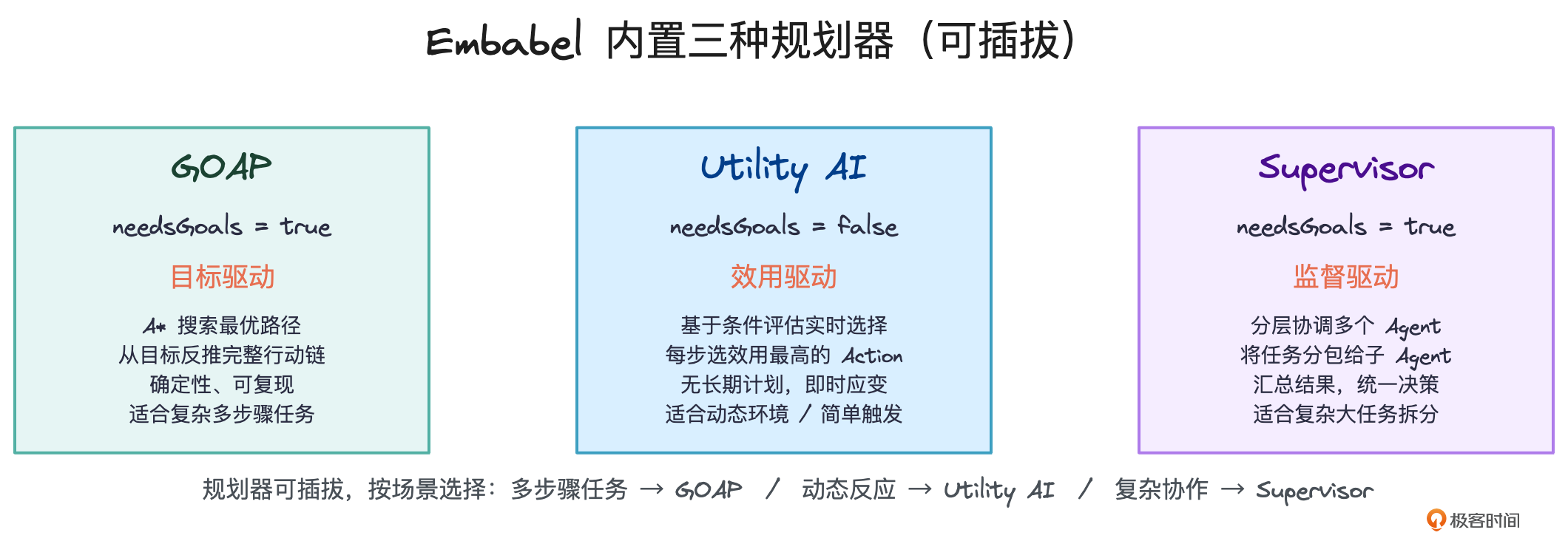
Embabel 对这三种规划器有明确的定义和分类。注意,一个隐秘但极其关键的信息是 needsGoals 这个布尔参数,它直接暴露了 Utility AI 和其他两种规划器在设计哲学上的根本分岔:
GOAP 和 Supervisor 需要 Goal,它们依赖于一个明确的目标作为规划的“北极星”。没有目标,A* 搜索不知道该往哪个状态走,Supervisor 不知道该把任务分包给哪个子 Agent。
Utility AI 不需要 Goal,它不问“我要达成什么”,只问“现在什么最重要”。这是一种从“目标驱动”到“条件驱动”的根本性转变,意味着 Utility AI 的工作方式与 GOAP 有本质不同,它不构建完整的多步骤计划,而是在每个决策点选择效用最高的单个 Action 执行。
公开
同步至部落
取消
完成
0/2000
 荧光笔
荧光笔 直线
直线 曲线
曲线笔记
复制
AI
- 深入了解
- 翻译
- 解释
- 总结
仅可试看部分内容,如需阅读全部内容,请付费购买文章所属专栏
《Java Agent:从 Demo 到生产级实践》,新⼈⾸单¥59
《Java Agent:从 Demo 到生产级实践》,新⼈⾸单¥59
立即购买
© 版权归极客邦科技所有,未经许可不得传播售卖。 页面已增加防盗追踪,如有侵权极客邦将依法追究其法律责任。

登录 后留言
精选留言
由作者筛选后的优质留言将会公开显示,欢迎踊跃留言。
收起评论